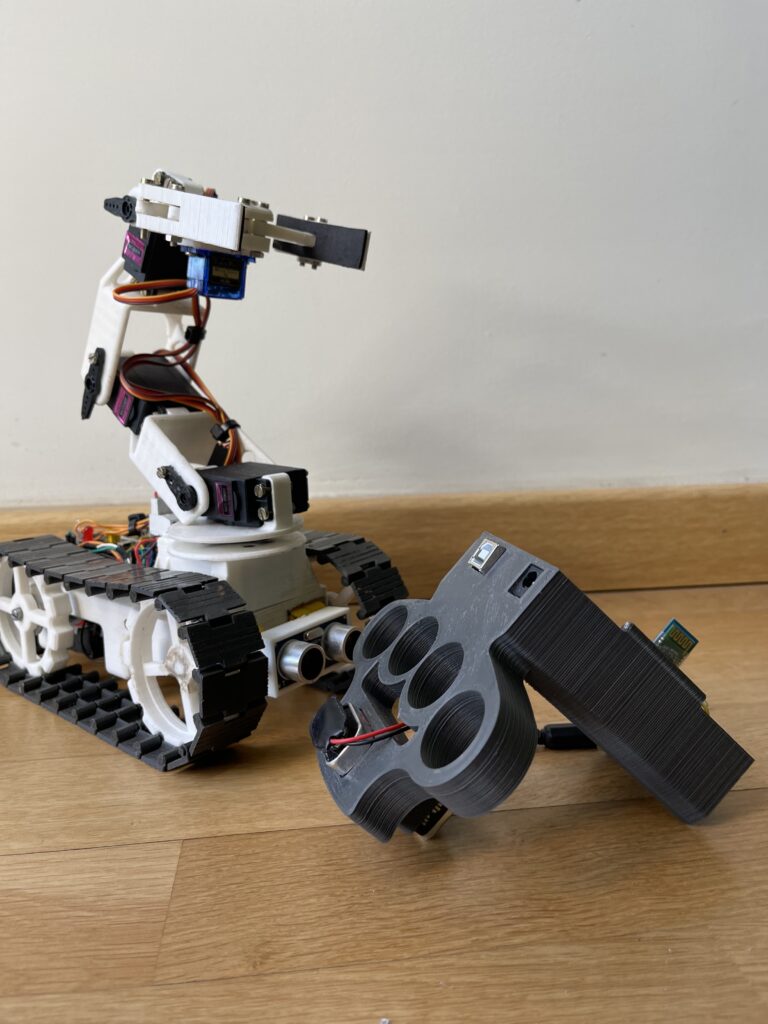
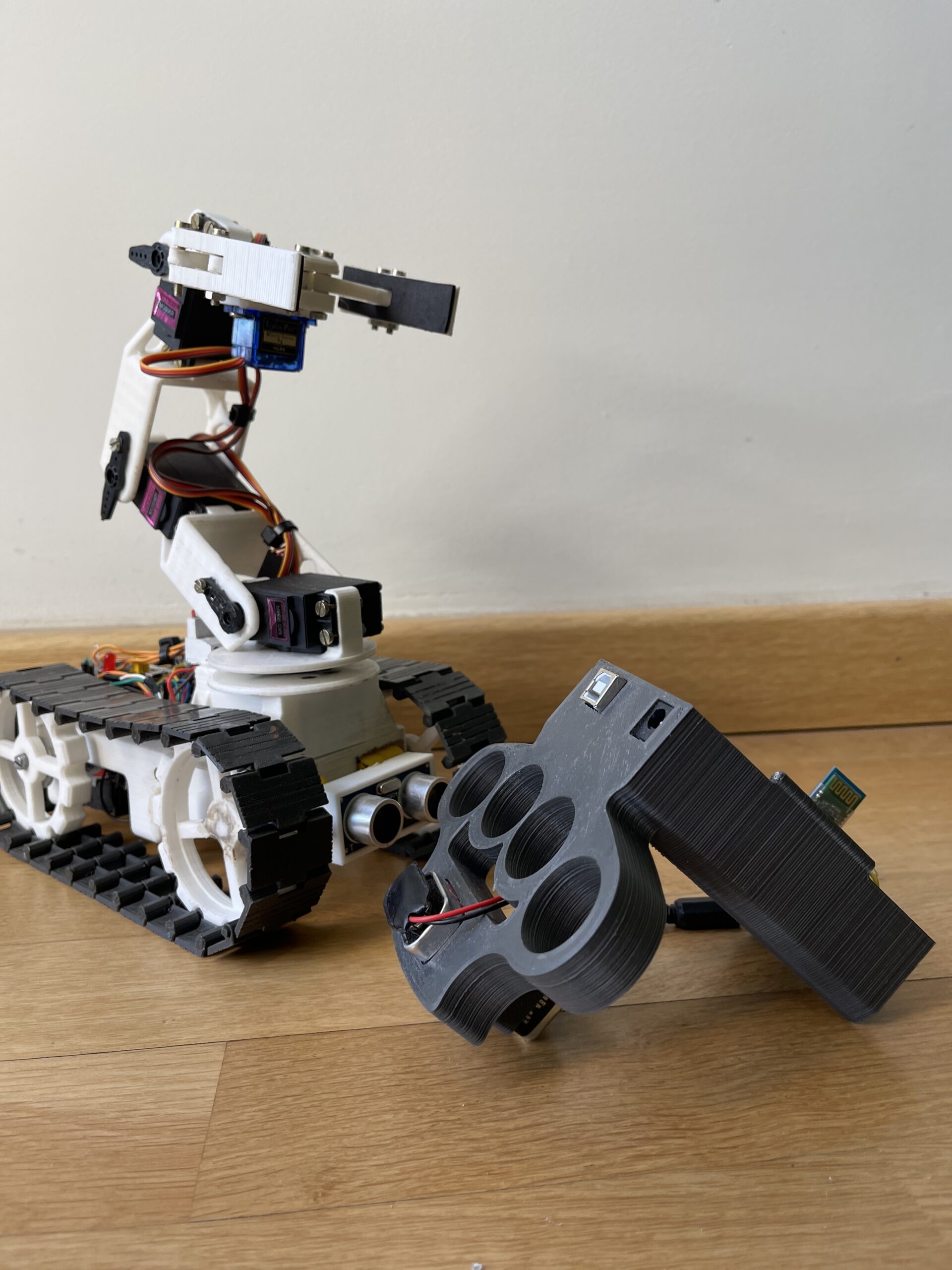
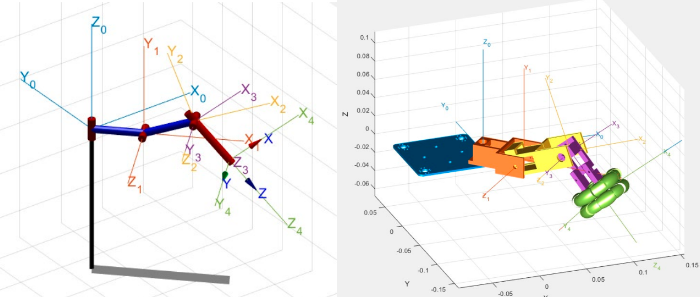
This is a mechanical tracked mobile robot equipped with a series type robotic arm whose functionality is the collection and transport of objects. It’s controlled by gestural control by sending instructions to the robot by bluetooth transmission, with the objective of developing a system of commands that is more natural and intuitive for the operator. This project was developed by Eduardo Pavez and I.
HOW?
The development boards chosen to carry out this work are: bluepill with an STM32F103C8T6 microcontroller, which has an ARM Cortex-M3 core, and Arduino UNO Atmega328P board. The development of the electronic system and software was self-authored, and the mechanical design was obtained from thingiverse, however, some changes were applied to it.
RESULTS
Through this project it was possible to strengthen aspects related to embedded systems programming, signal transmission, acquisition and processing of sensed data, and mechanical systems.
Very satisfactory results were obtained, however, in the future we plan to improve its autonomy and also to develop a virtual reality system through which it can be controlled.
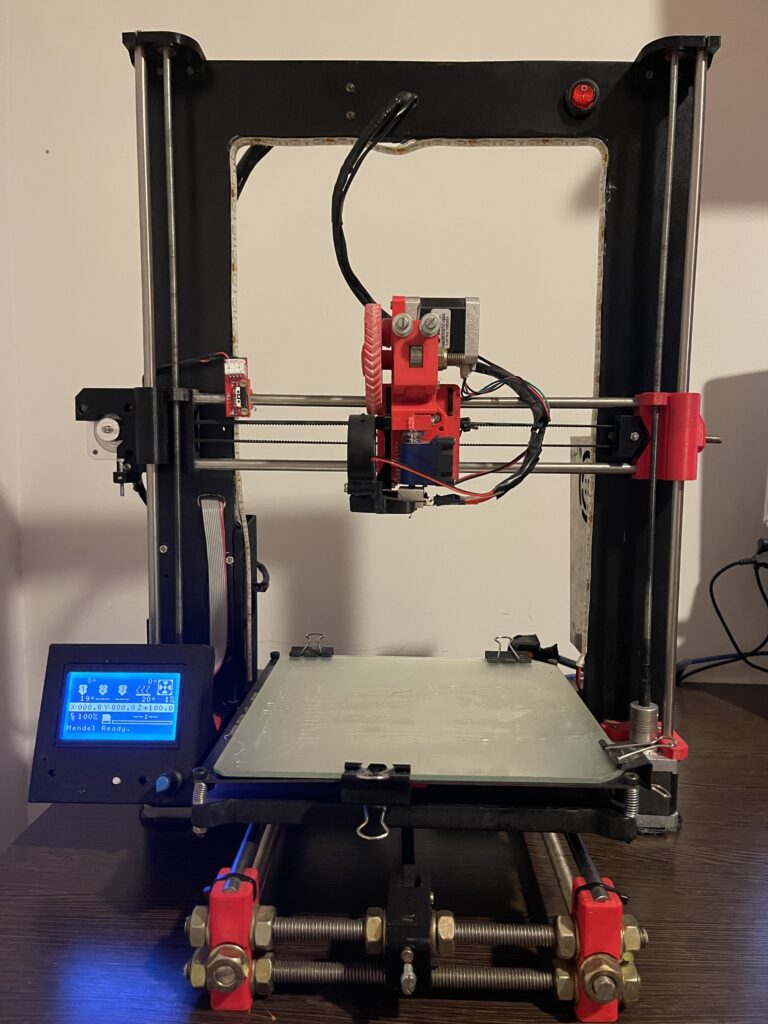
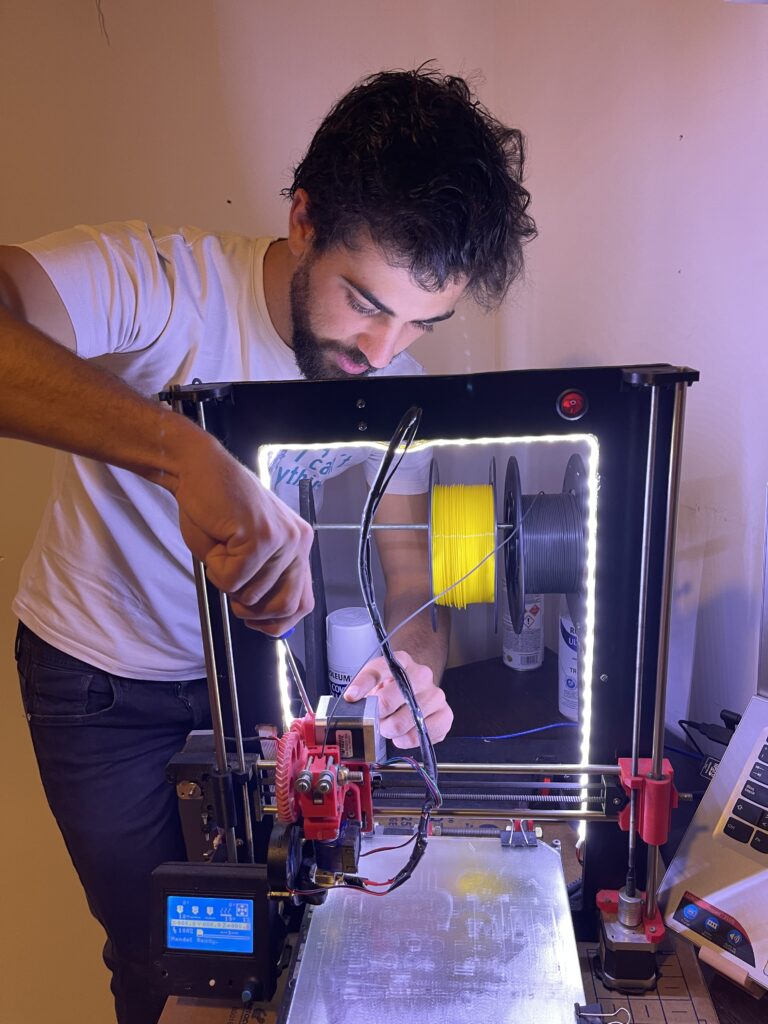
I am a big fan of 3d printing and additive manufacturing in general. Building my own 3d printer seemed like an interesting and fun challenge to me.
HOW?
It was developed using a large number of resources available on the internet and many custom enhancements have been added to it.
RESULTS
It has been a very enriching project where I was able to put into practice knowledge related to electronics, mechanics and software.
The 3d printer is an extremely useful machine tool. It allows you to develop a lot of prototypes and projects in a fast and economical way, moreover, by designing you can let your imagination and creativity fly and then, printing, you can get a physical result of those ideas.
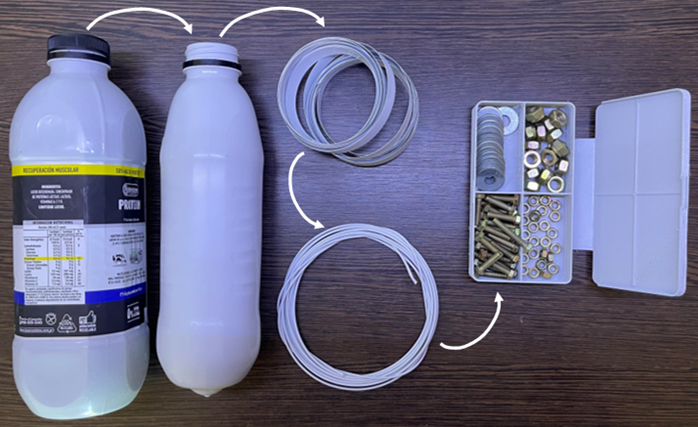
Extruder - Recycled 3d Printing Filament
WHAT?
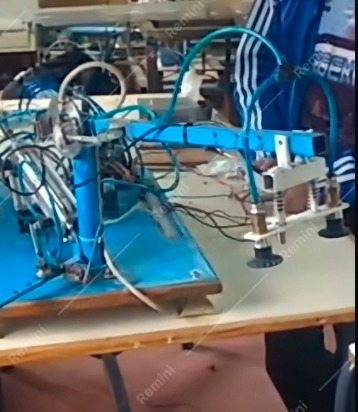
Through this system a filament for 3D printing is obtained from recycled bottles. It provides the benefit of continuing the life cycle of these wastes. Besides, this material (PETG) has very good characteristics as a material for printing, such as, higher mechanical and thermal resistance than PLA.
HOW?
Nowadays this is a recycling system that is gradually spreading among 3D printing enthusiasts, so there is a lot of information available on the internet. I used the 3d printer, and SolidWorks to obtained some of the mechanical components, and the control software was developed on Arduino IDE.
RESULTS
Quality: A good treatment and cleaning of the bottle is very important, as it is reflected in the quality of the print. With a good calibration of the printer, very satisfactory results are obtained.
Production capacity: So far it is a process that requires a lot of manual interaction. The idea is to be able to automate many of these processes and make this project more scalable.
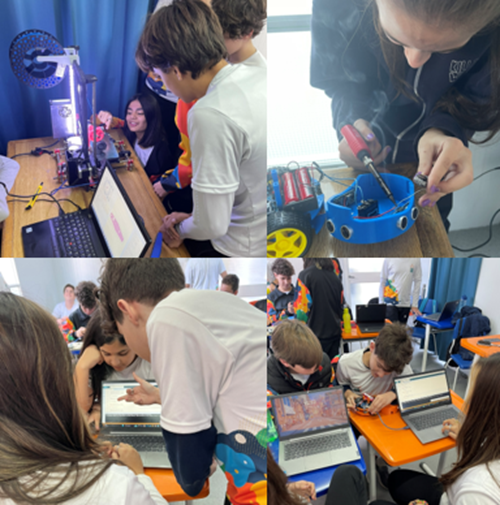
Educational robots as a robotics teacher
I had always wanted to experience the world of education as a teacher, so I stepped out of my comfort zone and accepted a position as a robotics teacher at a high school.
It was a great few months, where I learned a lot and taught kids one of my passions, robotics.
During this time in school I taught the basics of robotics at a high level (focused on children) such as microcontrollers (arduino), c++ programming, 3d modeling in tinkerkad and so on.
WHAT?
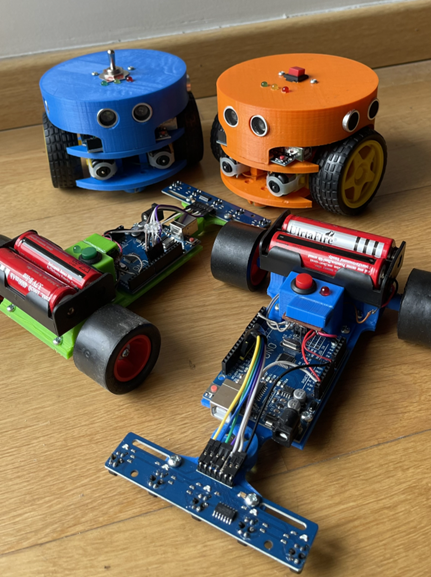
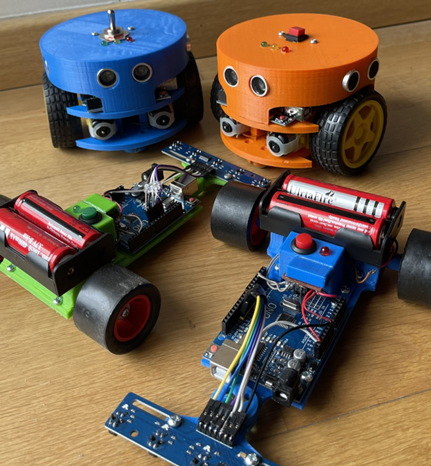
To apply all these different concepts, we developed two robots with the children. One was a maze-solving robot, and the other was a racing robot that had to follow a line on the ground.
HOW?
Maze-solving robot: this robot was composed of DC motors, an L298N dual H-bridge driver, an Arduino UNO, HC-SR04 ultrasonic sensors to measure distances and of course a power supply.
Car racing robot: Also composed of DC motors, an Arduino UNO, infrared sensors to detect colors, an L293D integrated circuit and the power supply.
During this process, the children learned about the hardware components and also how to program them. I taught them how to design the electronic circuit in tinkercad, and they also learned how to design and print the structure of the robots.
RESULTS
It was a fantastic experience, both for me and for the kids, it was a process full of learning. As for the robots, they showed a good behavior, although there was a lack of improvements in the software to optimize them.
Remote Control System for Mobile Robot
WHAT?
Together with Eduardo Pavéz, we developed a project that encompassed various concepts such as: Artificial Intelligence hand recognition, virtual environment simulation, virtual reality and augmented reality, Bluetooth and TCP/IP data transmission, 3D design and prototyping, and cloud computing. The purpose of the project was to create a remote control system for a mobile robot equipped with a robotic arm and camera, which would allow for inspection of difficult or dangerous areas for human beings.
HOW?
The simulation developed in Unity serves as training for the operator and presents a possible extension, which is the real-time representation of the image sent by the robot’s camera. In this way, it is possible to inspect areas that compromise the safety of the operator from a distance.
We developed two versions of the system: one for PC that has a gesture control system accompanied by a hardware device, and another mobile version with purely gesture control. Both versions also have an operator registration system through credential identification.
RESULTS
Two simulations were developed, one for PC and one for mobile. The PC simulation offers greater security with a physical credential and joystick control, while the mobile simulation is more affordable and accessible, leveraging cloud processing. However, the mobile simulation has limitations regarding credential falsification and potential errors in hand tracking. Ultimately, the choice depends on the operator’s preference and intuitive usage.
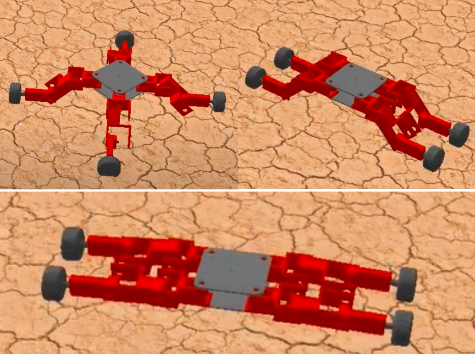
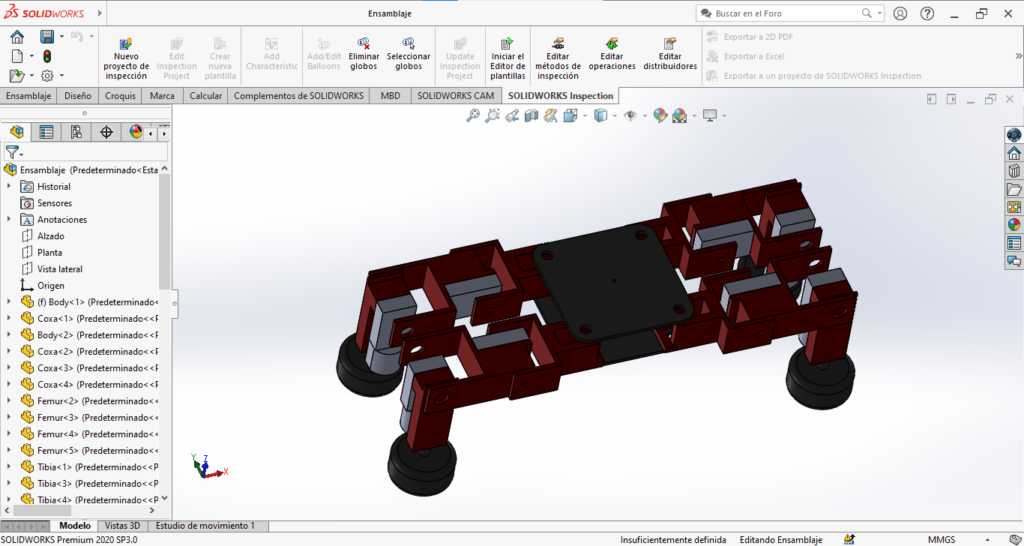
This is a mobile robot of the quadruped type with wheels, whose purpose is to serve in rescue missions in the event of natural disasters such as earthquakes. This project was developed together with Luciana Costamagna and Gabriel Cabrero for the Robotics II course at the Faculty of Engineering, National University of Cuyo.
HOW? It was not built, but rather certain modifications to an existing model were developed and a kinematic and dynamic analysis was performed, allowing the selection of the appropriate actuators and components to estimate the final cost of the robot and its behavior, validating these analyses by means of a simulation in Webots.
RESULTS
A very realistic approximation to the real robot was obtained, which allows to modify it, iterate, and test different configurations to maximize performance before being taken to reality.
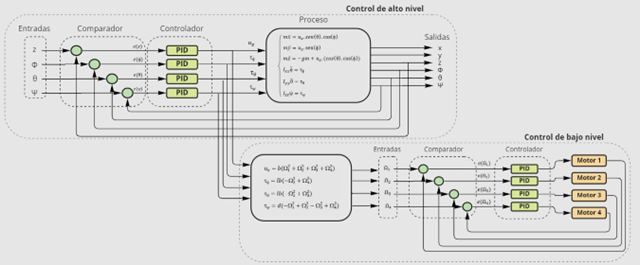
This is a project developed for the Control and Systems course of the Faculty of Engineering of the National University of Cuyo, which shows the development and simplified mathematical model that describes the dynamics of a quadcopter. The aim is to develop a control system that enables stable flight even in the face of external disturbances.
HOW?
The system has been modeled in Matlab/Simulink, and a PID control system has been developed and implemented in order to comply with certain specific instructions, under controlled conditions and under a noise disturbed environment.
Quadcopter control system modeling
RESULTS
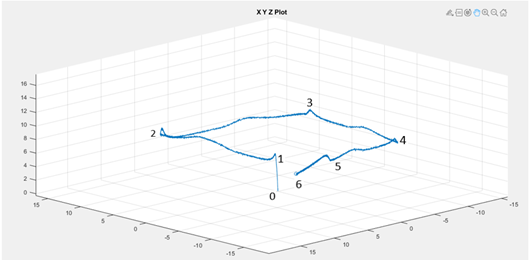
This project allows a visualization of the aircraft dynamics sufficiently in line with reality, and what one as a drone pilot could intuit from the real system. An important aspect to highlight is the high efficiency and ease of implementation of PID controllers, and in turn the advantages offered by Simulink when configuring them. The fact of developing a block diagram in Simulink is very useful because it allows to predict possible behaviors of the real system and to avoid possible drawbacks, allowing, in case they happen, a faster diagnosis. In addition to being able to iterate repeatedly in search of the optimal system parameters.
Computer Vision for object recognition and distance measuring
WHAT?
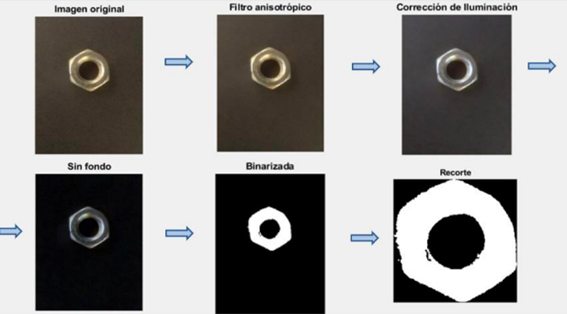
Throughout this project, an algorithm was developed capable of identifying and recognizing different types of objects by reading a digital image, and also calculating the measurements of that object. This algorithm is carried out in different stages of image acquisition, processing and filtering, feature extraction and classification of the image.
HOW?
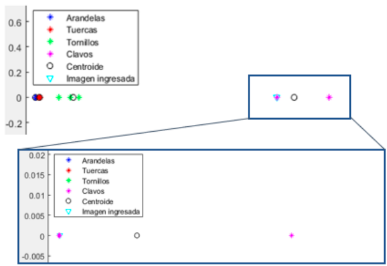
It is developed in MATLAB. Use was made of certain image acquisition and filtering functions, preset in the Matlab toolbox, and other self-developed classification functions based on algorithms such as knn and k-means. In addition, another algorithm is used to calculate the corresponding hu moments for each image. These moments represent physical characteristics and features of an object, which are invariant to the translation, rotation and scale of the object to be analyzed.
RESULTS
In general, both algorithms work adequately, however, the most important and critical moment is not in the classification stage, but in the image acquisition, processing and filtering stage, on which depends to a great extent the accuracy of the algorithms. With a well-defined and filtered image, the hu moments (characteristic features of the image) vary very little between photographs of the same objects, and in these cases the classification algorithms are more likely to work correctly and get it right.